Abstract
SLAM methods based on 3D Gaussian Splatting (3DGS) have demonstrated impressive tracking and mapping performance, but typically require additional geometric information from external depth sensors. Meanwhile, recent SLAM systems that leverage geometric priors from pre-trained feed-forward models enable real-time dense reconstruction, yet often discard original RGB information during optimization, thus degrading overall reconstruction quality.
We present GeoGS-SLAM, an online monocular dense reconstruction system that combines the 3DGS-based map representation with learned geometric priors. Given uncalibrated RGB input, we first employ a feed-forward visual geometry model to predict camera and scene priors. The Gaussian scene map is then expanded by directly sampling Gaussian primitives from both RGB input and geometric priors. Camera poses and the scene map are jointly optimized through a coarse-to-fine strategy that minimizes both photometric and geometric losses. To ensure global consistency, we further incorporate online loop closure detection and pose graph optimization.
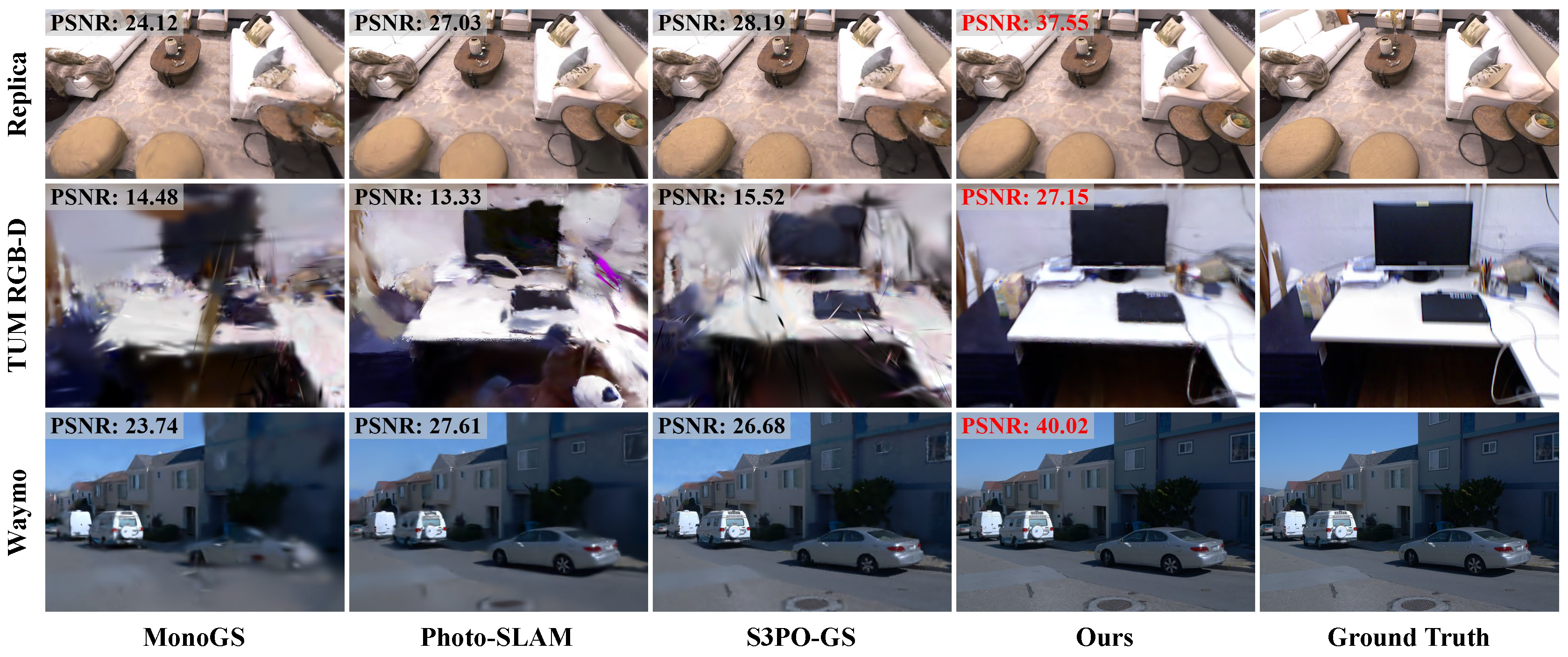
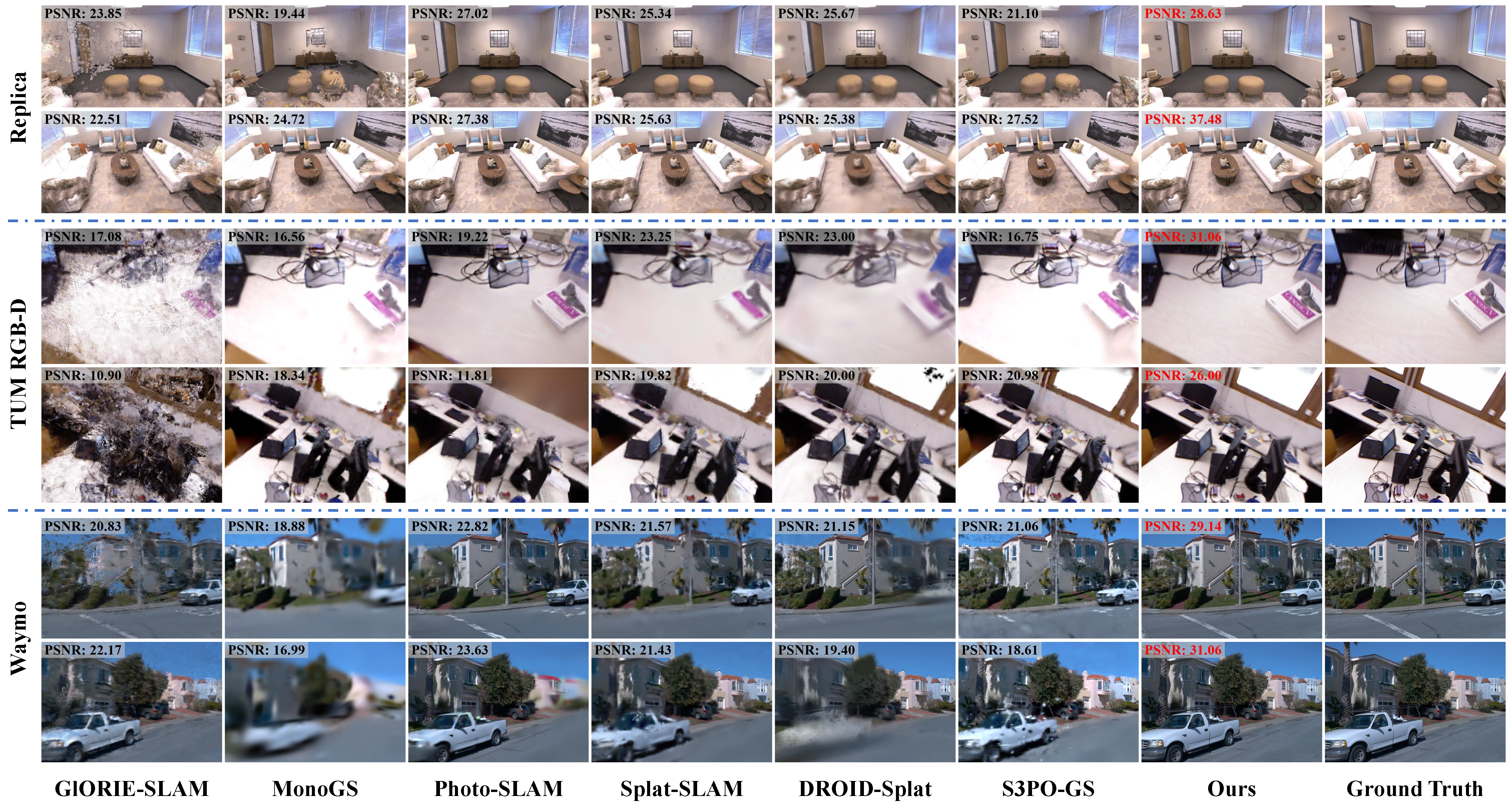
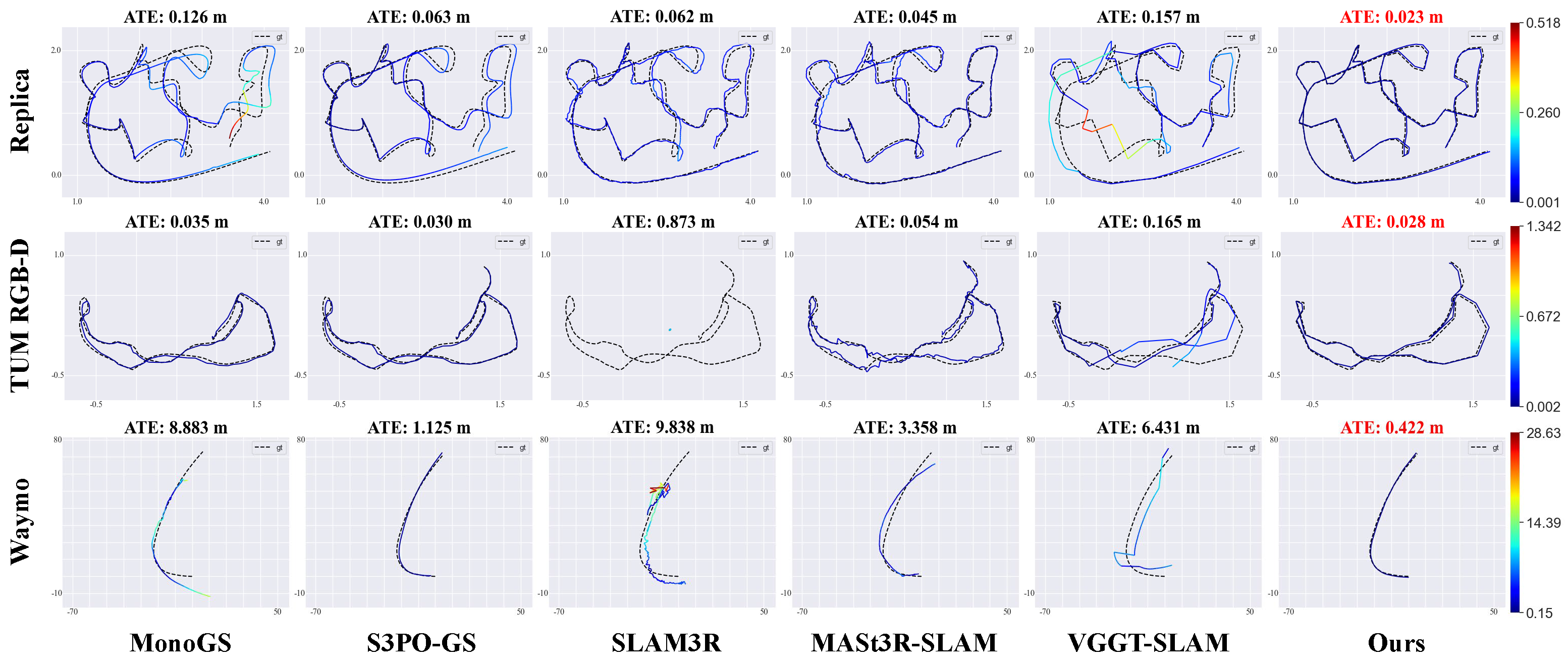
Extensive experiments across indoor and outdoor benchmarks demonstrate that GeoGS-SLAM achieves superior rendering quality and tracking accuracy compared to state-of-the-art methods while maintaining online real-time performance.
Method
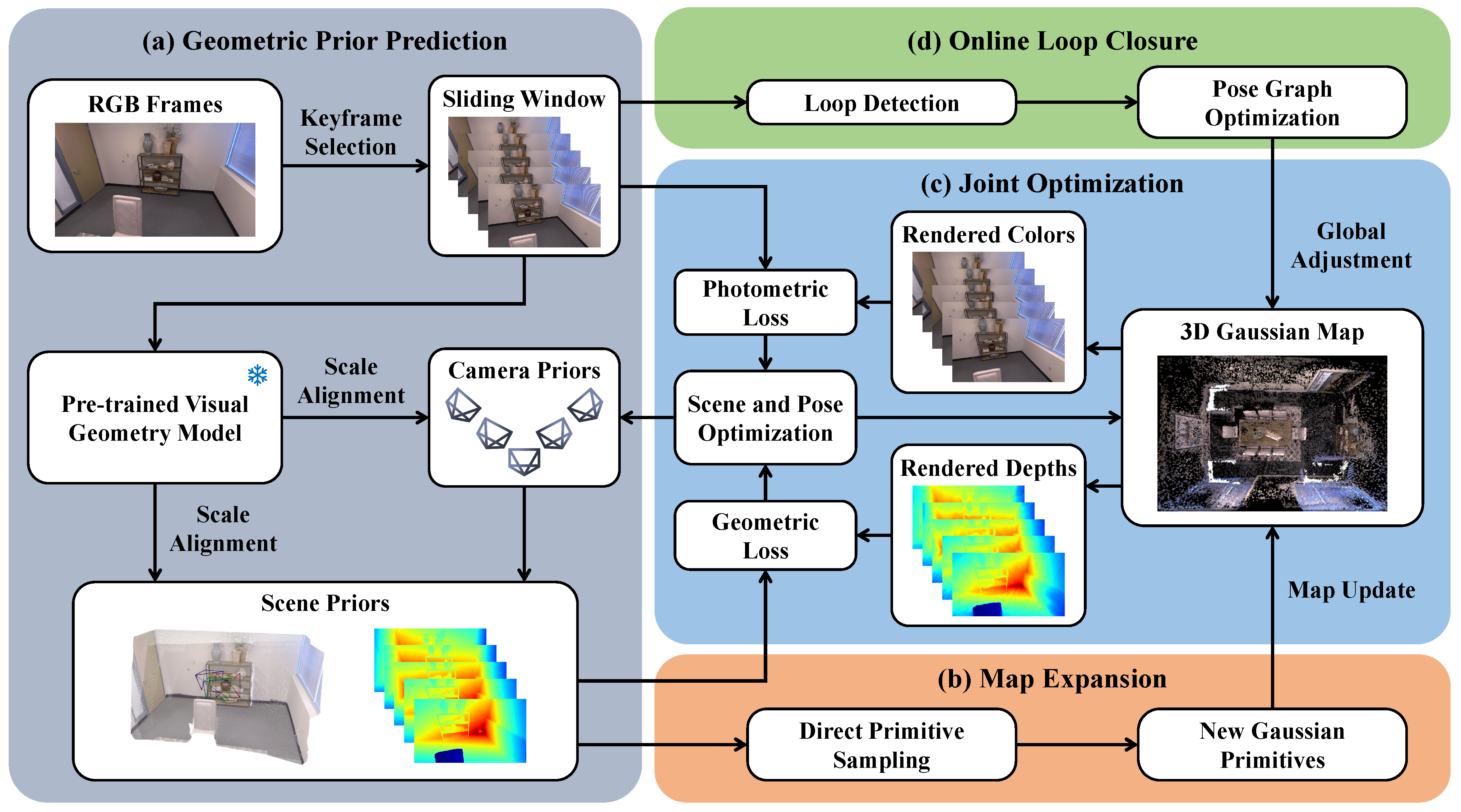
GeoGS-SLAM integrates 3D Gaussian Splatting with learned geometric priors in a unified framework for monocular dense reconstruction. Our approach consists of four core components:
- Geometric Prior Prediction leverages a pre-trained model to produce priors of camera parameters and scene geometry from RGB keyframes;
- Map Expansion updates the Gaussian map through direct primitive sampling;
- Joint Optimization refines both the map and poses via rendering-based photometric and geometric loss minimization;
- and Online Loop Closure with pose graph optimization further ensures global consistency.
Results
We provide extensive experimental validation across indoor and outdoor benchmarks, demonstrating the superior performance of our approach compared to SOTA monocular SLAM methods in tracking accuracy and rendering quality.